「組込みシステム開発実習」(情報工学科 ロボット開発コース 2年前期)
実践を重視する本学では、従来の大学教育が一般的に学術を中心に広く知識を修得する学びであるのに対し、知識・理論と技術・実務の双方を学び、早い段階から実社会を見据えた実習授業も行われます。
1年次で実際の製品やシステムの調査分析を通してものづくりやサービス開発の基礎を修得し、専門コースに分かれる2年次から早速、グループワークでの「開発実習」の授業もスタートし、企画から開発までの専門的な知識・技術を身につけていきます。
今回は情報工学科【ロボット開発コース】の2年生の学生たちから、「つくる面白さと苦しさの両方を味わえる。この授業が自分にとって一番楽しい授業です!」「組込みの大変さや各モジュールの操作方法、製品製作の進行方法などをしっかり理解できました」などの声もある、人気の「開発実習」の授業を紹介します。
「人工知能システム開発実習」(2年前期)
人工知能の基礎技術をプログラミング実装することにより理解を深めること、及び情報工学専門家として人工知能システムの開発技術を利用し、IT企業での開発実務を想定して実習を行います。
授業のテーマ
ロボットを含む各種組込みシステムに求められるハードウェアおよびソフトウェアの基本要素に関する実装技術を習得するため、マイクロコンピュータを用いた組込みシステムの設計から、実装、評価までの一連の流れを習得する。
授業の流れ
事象駆動システムにおける状態遷移の設計およびプログラミング、動作検証 ↓ マイコン制御システムの設計、制作、単体テスト、システムテスト ↓ 要求仕様や基本設計など開発に必要となるドキュメントを制作 ↓ 課題制作(企画、設計、ハードウェア製作、ソフトウェア開発、システムテスト) ↓ 最終発表
2022年度 最終発表(全12チーム)
- LCDタッチパネルによるDCモータ制御システム
- フラッシュ暗算システム
- お絵描き絵しりとりシステム
- サーボモーター制御システム
- 力方向可視化システム
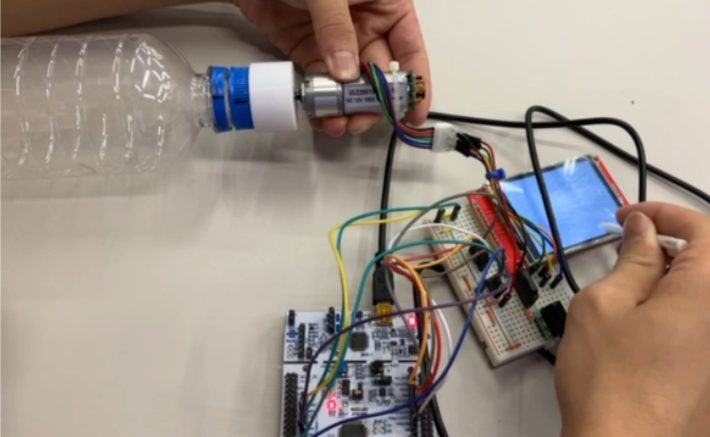
- ちきちきキャップ開けゲームシステム
- 赤外線受信システム
- モーターパワー選択システム
- お絵描きボードシステム
- 数字あてシステム
- クラッシャーシステム
- 〇×ゲームシステム
1.LCDタッチパネルによるDCモータ制御システムの最終発表より(抜粋)
制作の目的
概要
内容
①マイクロコンピュータにてLCDパネルにタッチパネル状態およびモータの回転指示表示処理を行う
②タッチパネルに指やスタイラスペンが触れたときは接触位置を特定してモータの回転・停止をDCモータドライバーICに出力する
③DCモータドライバーICは受信した信号を基にDCモータを駆動する
システムの活用案
使用した教材と設備
・LEGO Mindstorms EV3 ※状態遷移を実装した自律駆動型ロボット開発で使用
・STM32 Nucleo Board ※C/C++言語によるマイコン制御プログラミングのターゲットボードとして使用
・各種電子部品 ※加速度センサ、LCDパネル、DCモータおよびモータドライバーICなど
制作物
その他のチームの制作物の様子
4.サーボモーター制御システム

6.ちきちきキャップ開けゲームシステム